Interrupts (ISR, IVT, NVIC)
🟠 Interrupts allow the microcontroller to instantly respond to important events without wasting resources on constantly polling the peripherals.
When an interrupt occurs, the CPU suspends the current task, goes to the Interrupt Service Routine (ISR), performs the required action, and returns back.
Interrupts
An interrupt is a signal that tells the microcontroller's processor to temporarily suspend execution of the current task and go to a special function called an interrupt handler (ISR). After the ISR completes, the processor returns to the point where the program was interrupted and continues executing it.
- Real-time response: for example, a timer has expired, data has arrived via UART, or a button has been pressed.
- Power saving: the MCU can "sleep" and wake up only on interrupt.
- CPU offload: eliminates the need to check event flags in a loop.
Interrupt reasons:
- Hardware events: for example, a GPIO pin state change, UART data transfer completion, or a timer expiration.
- Software events: for example, errors like division by zero or access to inaccessible memory.
Interrupt types
By source
- External interrupts: caused by external events, such as pressing a button or changing the signal level on a pin.
- Internal interrupts: initiated by peripheral modules inside the MCU, such as timers, ADC (analog-to-digital converter), UART, etc.
By processing method
- Vector interrupts: each interrupt source has its own unique handler. This is typical for most modern MCUs, such as ARM Cortex-M.
- Non-vector interrupts: all interrupts are handled by one common function, which then determines the source of the event.
By priority
- Fixed priority: the processing order is set by hardware and cannot be changed.
- Programmable Priority: The developer can configure interrupt priorities, which is especially useful in complex systems.
ISR and IVT
Interrupts are handled by Interrupt Service Routines.
- These are just
functions, but you may be wondering, "How does the hardware know which function to call for which interrupt?" These functions are defined in theIVT(interrupt vector table). - The
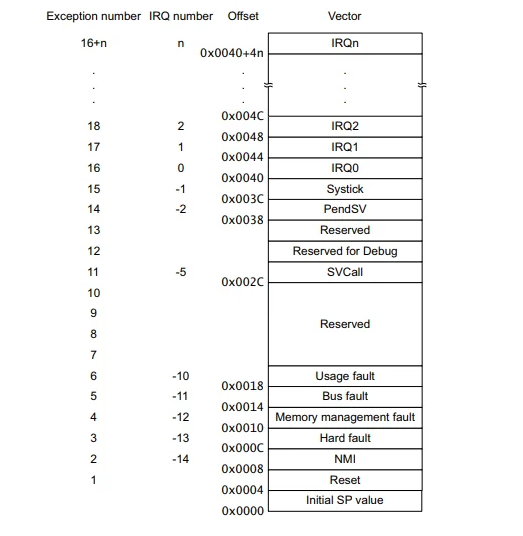
IVTis a data structure that maps each interrupt type to the address of the corresponding handler.
Here we see the vector table of ourCortex-M3. It shows each interrupt and its corresponding location in memory.
When the system starts, the initialization code specifies the necessary functions in theIVT.
How the CPU handles interrupts
At a high level:
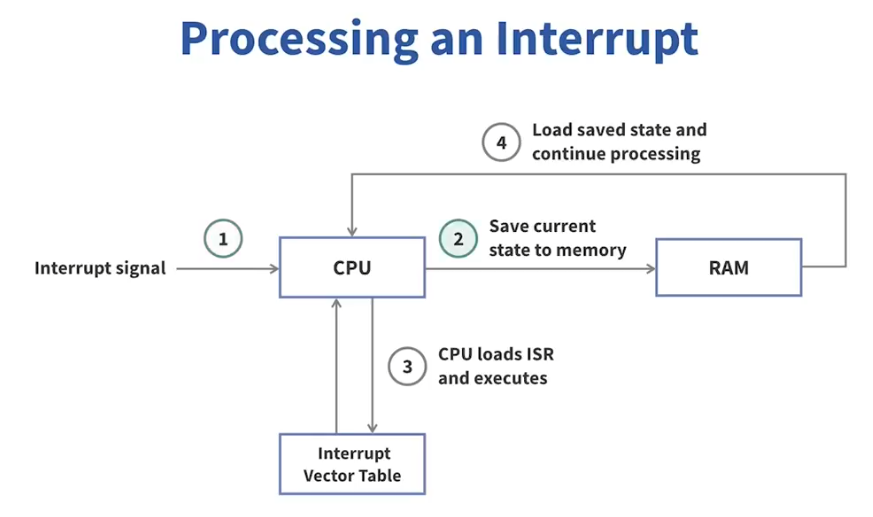
- When an interrupt is triggered, the CPU receives a signal to handle it. The CPU will probably be busy with some other work. However, we want it to continue where it left off after handling the interrupt.
- To do this, the CPU saves the current execution state, which includes the registers and the current address of the current instruction.
- It then looks up the
IVTto find the memory address of theISR, and then executes it. - It then restores the interrupted execution state from
RAMand continues.
Interrupt Priorities
What happens if we have multiple interrupts firing at the same time? We handle them by priority.
Interrupts have a priority associated with them. When multiple interrupts fire, the interrupt with the highest priority is handled first. Furthermore, a higher priority interrupt can even interrupt a lower priority interrupt.
This ensures that critical interrupts are handled in a timely manner. This is especially useful in hard real-time systems where they are the upper bounds of worst-case performance.
How to set up an interrupt in an MCU
There are several steps to using interrupts in an MCU:
- Enabling interrupt: Enable the interrupt for the desired source (for example, in the timer or GPIO settings).
- Setting priority: If the MCU supports programmable priorities, set the priority level for this interrupt.
- Writing a handler: Create an
ISRfunction that will be executed when an interrupt occurs. - Registering a handler: In some architectures (for example,
ARM Cortex-M), specify the handler address in the vector table.
NVIC (Nested Vectored Interrupt Controller)
Many modern MCUs are based on the ARM Cortex-M architecture, where interrupt management is performed via the NVIC (Nested Vectored Interrupt Controller). Let's consider its features:
- Vector table in memory
- Priorities from 0 (highest) to 255 (lowest)
- Nested interrupts — high-priority ones can interrupt ISR
- Tail-chaining — instant transition from one ISR to another without returning to the main code
🧪 Example in Rust (STM32)
use cortex_m_rt::interrupt;
#[interrupt]
fn TIM2() {
// TIM2 timer interrupt handling logic
// For example, clearing the interrupt flag or performing an action
}
#[interrupt]— ISR designation (indicates that the function is an interrupt handler.)TIM2— interrupt name corresponding to TIM2 timer (according to the vector table)
Safety: Critical Sections
Interrupts can interfere with the main code. To protect shared data:
A simple way is to temporarily disable interrupts
use cortex_m::interrupt;
interrupt::free(|_| {
// Critical Section: Safe Access
});
Mutex and RefCell
use cortex_m::interrupt::Mutex;
use core::cell::RefCell;
static SHARED_DATA: Mutex<RefCell<u32>> = Mutex::new(RefCell::new(0));
#[interrupt]
fn EXTI0() {
interrupt::free(|cs| {
let mut data = SHARED_DATA.borrow(cs).borrow_mut();
*data += 1;
});
}
Interrupt Handling Guidelines
- Minimize time in ISRs: Keep handlers short so as not to block other interrupts or the main program.
- Avoid blocking: Do not use delays or other blocking operations in ISRs.
- Use flags: Pass data from ISRs to the main program via flags or queues.
- Clear flags: Make sure the interrupt flag is cleared in the ISR if required.